Abstract
My area of research is centered around soft robotics. I approach this field from three perspectives: soft robots design, mechanical science, and materials science. These three areas allow me to delve into individual scientific problems while also integrating them to create complex soft robot systems. In this research statement, I will briefly introduce my findings in each subtopic.
0. Introduction
As a strongly intersected discipline, soft robotic research can be carried out from different perspectives, such as robotics, control science, mechanical science, material science, computer information technology, advanced manufacturing technology, etc. In my research on soft robotics, I primarily focus on three key subtopics: soft robot design, mechanical science, and material science. These areas enable me to address specific tasks within soft robotics while also facilitating their integration to create comprehensive soft robotic systems.
Specifically, as shown in Figure 1, my soft robotics studies including: using combustion to actuate soft robots, fluid dynamics of underwater soft robots, modeling multiphase motions (e.g., leaping out of water), contact mechincs, building multiphysics coupling models, modeling large deformation behaviors of flexible materials, smart materials and structures, and investigating biomedical applications. By exploring these diverse subtopics, I aim to advance the understanding and capabilities of soft robotics and contribute to the development of innovative and versatile soft robot systems.
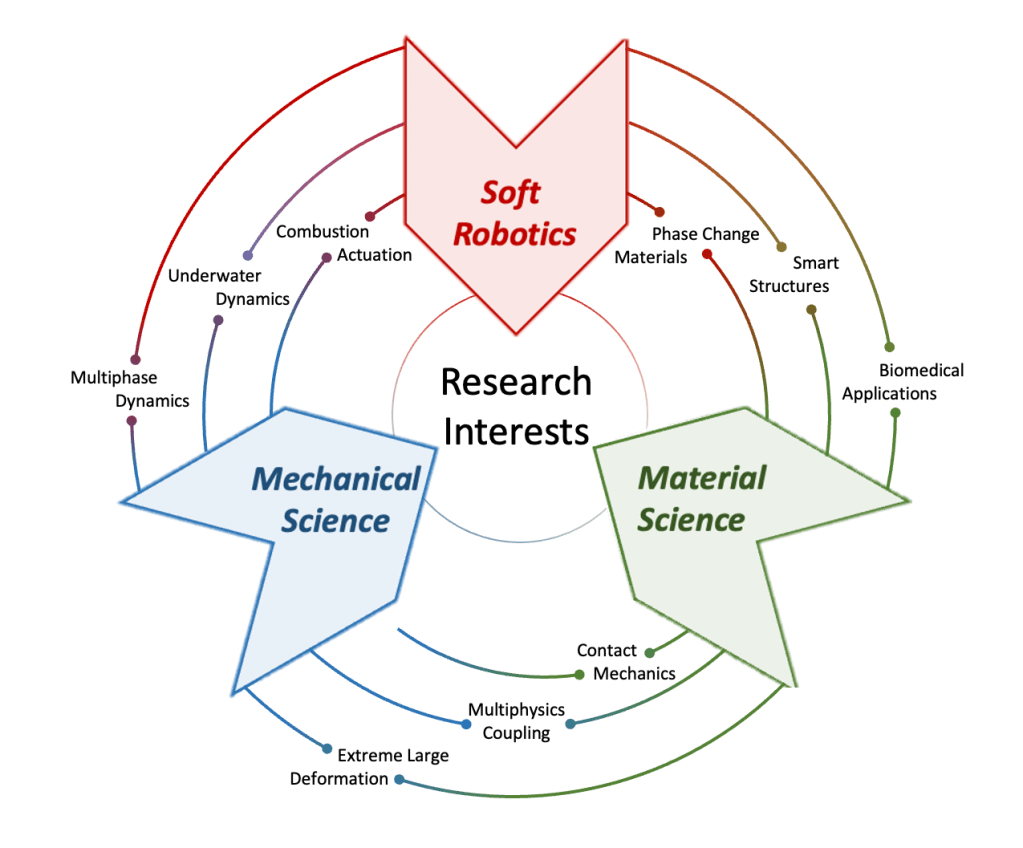
Figure 1. A diagram of my research interests, including three main perspectives: soft robotics, mechanical sciences, and material sciences.
1. Soft Robot Design
My previous research experience in soft robot design has primarily focused on combustion-enabled, classic pneumatic, and magnetic soft robots.
Combustion-enabled soft robots represent a unique category of extreme pneumatic soft robots, propelled by the ignition of premixed combustible gas with a high energy density. The pioneering principle of applying explosions as an actuation method for soft robots was introduced by excellent soft robotics researchers, including Profs. Michael T. Tolley, Robert F. Shepherd, George M. Whitesides, and Robert J. Wood [1-3]. Drawing inspiration from their groundbreaking ideas, my previous works on combustion-actuation have been dedicated to enhancing the understanding of “how to precisely control combustion-enabled soft robots, enabling them to execute agile and rapid motions underwater.”
As shown in Figure 2, my previous works on combustion-enabled soft robots were systematically conducted from actuation mechanisms, design optimizations, fluid dynamics, and cross-environment signal transmission applications, which respectively answer the questions of “how to calculate combustion thrusts?” [4], “how to design and optimize a combustion actuator?” [4-5], “how to predict underwater motions?” [6-9], and “how to apply them?” [6]. (see Movie 1)
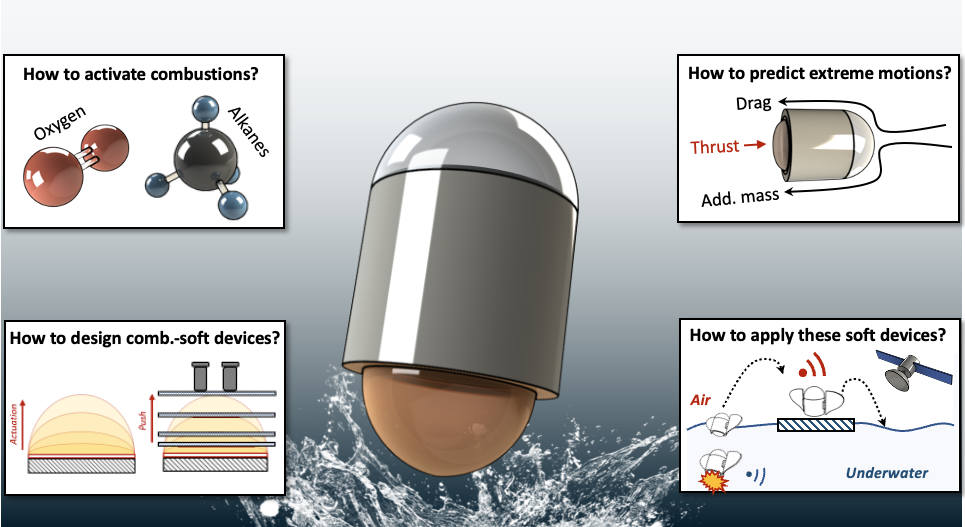
Figure 2. Combustion-enabled soft robot studies, including actuation mechanisms, design optimizations, fluid dynamics, and cross-environment signal transmission applications.
Movie 1. Systematic studies on combustion-enabled soft robots answer four questions: “How to calculate combustion thrusts?”, “How to design and optimize a combustion actuator?”, “How to predict underwater motions?” and “How to apply them?”.
Classic pneumatic soft robots have witnessed significant advancements due to their potential for compliant human interactions and their suitability for biomedical applications, such as rehabilitation and prosthetics. My previous studies on classic pneumatic soft robots mainly focus on designing lightweight, modularized, and controllable actuators for biomedical purposes.
As shown in Figure 3, simply applying commercially obtained latex balloons and TPU printing materials, a lightweight pneumatically elastic backbone structured (PEBS) soft actuator was developed. The PEBS actuators are of satisfactory controllability due to the comprehensive understanding of the strongly nonlinear coupling phenomenon [10]. (see Movie 2)
Moreover, there are some attempts to design bioinspired soft robots by developing a type of creative pneumatic actuator. (see Movie 2)
Regarding the magnetic soft robots, please refer to Section 2. Material studies for soft robots, as this category strongly relies on functional materials.
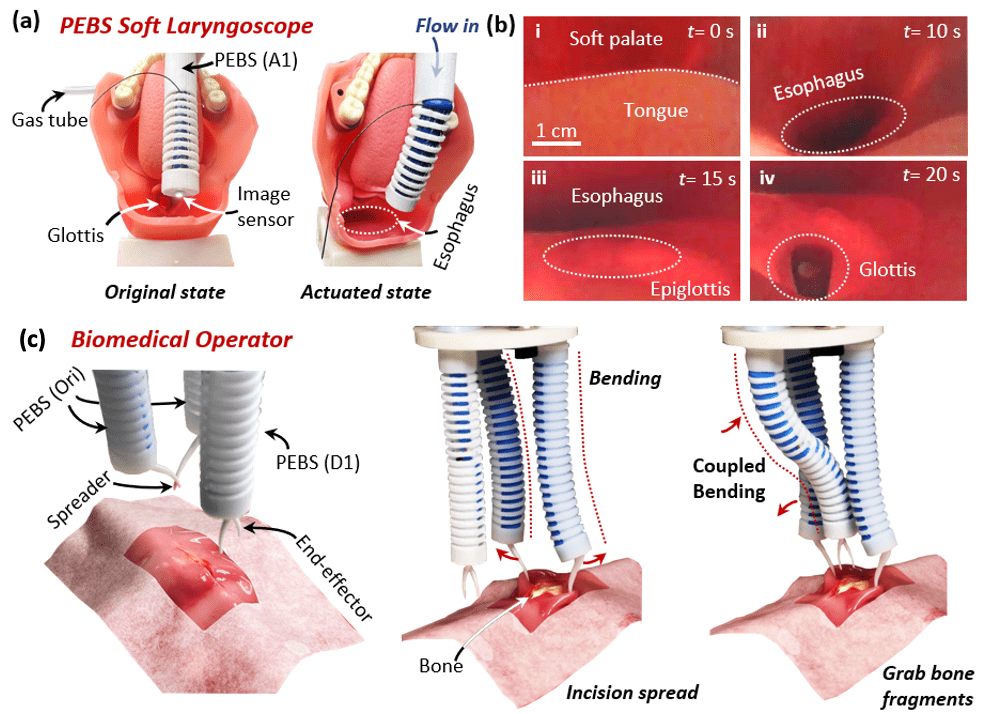
Figure 3. A lightweight pneumatically elastic backbone structured (PEBS) soft actuator can be designed into biomedical tools, such as PEBS soft laryngoscope and biomedical operators.
Movie 2. Demonstrations of PEBS soft actuators and other attempts to design bioinspired soft robots by pneumatic soft robots.
2. Smart Materials for Soft Robots
The smart material for soft robots I discovered is magnetically induced meltable materials (MIMMs), which can perform reversible elastomer-fluid transitions. [11] Different from existing phase change materials, the MIMMs at their common state are elastomers, which perform recoverable deformations, such as stretching, twisting, and bending. The elastomericity with a Young’s modulus of ~8 MPa make MIMMs suitable for soft robots.
MIMMs were investigated from various perspectives. The phase transition principle was explained by material analysis, and material characterizations were conducted to understand the reversible elastomer-fluid transition. Self-abilities and new abilities gained by interacting with external objects are validated and demonstrated by conducting experiments (shown in Figure 4 and Movie 3).
MIMM’s nature (phase change, elastomer, magnet responsiveness) endows MIMMs-robots with multi-functionality, such as self-healing, reshaping, self-division, self-assembly, etc. By interacting with external objects, MIMMs-robots can learn new abilities, such as “symbiosis”, “collaborate to repair fractured structures”, “environmental adaptability”, and “insulating broken electricity wires”, etc.
Application wise, MIMMs can be fabricated into a type of cathethers that can self-divide and reconfigure, which showcased some potential application scenarios, such as “cathether carriers”, “path lock”, and “object grab”.
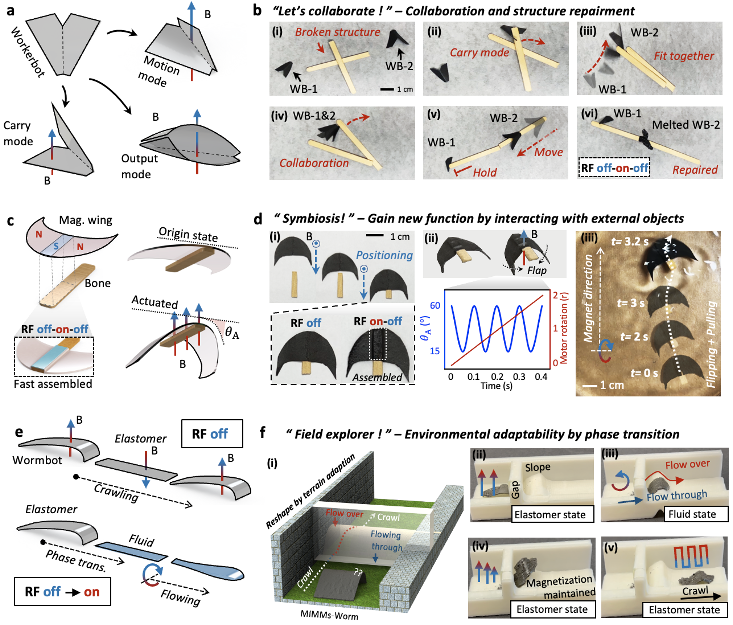
Figure 4. Combustion-enabled soft robot studies, including actuation mechanisms, design optimizations, fluid dynamics, and cross-environment signal transmission applications.
Movie 3. Demonstrations of MIMMs’ multi-functionalities, including phase change, self-healing, environmental adaptability, electrically nonconductivity, “symbiosis”, and in situ drug delivery.
3. Mechanics for Soft Robots
A well-known fact is that modeling large deformation behaviors of flexible materials is challenging, let alone extreme conditions, such as explosion. My previous mechanical studies are developing numerical and theoretical models for soft robots by coupling multi-physical mechanics, such as large deformation, explosion dynamics, fluid dynamics, etc.
My previously developed challenging models can be taken as examples. As shown in Figure 5, to accurately calculate the combustion-generated thrust forces, which is an essential parameter in predicting motions, a large deformation-explosion dynamics coupled model was developed with a satisfactory agreement between experimental and numerical results [4]. The other case is modeling PEBS soft actuators’ bending performances (Figure 6). The strongly nonlinear interaction between the hyperelastomer (i.e., latex balloon) and classic elastomers (i.e., 3D-printed shell) was accurately simulated [10].
Environmental mechanics, such as fluid dynamics and magnetics, are also considered in previously developed models. For example, underwater swimming, steering, and rotational motions of combustion-enabled soft robots in high-Reynolds conditions were successfully simulated by building a computational fluid dynamics (CFD) model [6]. Leaping-out motions from water to air is an interesting function of combustion-enabled soft robots, which is a multi-phases phenomenon and successfully described by solving the volumn of fluid (VOF) module [7] (see Movie 4).

Figure 5. Large deformation-explosion dynamics coupled model, which can describe the transient actuation process in millisecond magnitude with satisfactory prediction accuracy.
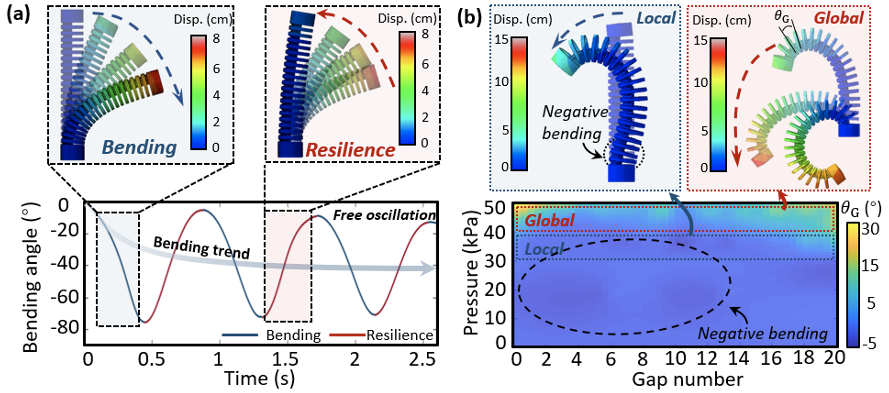
Figure 6. Hyperelastomer-elastomer coupled numerical model to descirbe the bending performances of PEBS soft actuators.
Movie 4. Demonstrations of multiphysics coupled numerical simulations.
References
1. Shepherd, R. F., Stokes, A. A., Freake, J., Barber, J., Snyder, P. W., Mazzeo, A. D., … & Whitesides, G. M. (2013). Using explosions to power a soft robot. Angewandte Chemie International Edition, 52(10), 2892-2896.
2. Bartlett, N. W., Tolley, M. T., Overvelde, J. T., Weaver, J. C., Mosadegh, B., Bertoldi, K., … & Wood, R. J. (2015). A 3D-printed, functionally graded soft robot powered by combustion. Science, 349(6244), 161-165.
3. Tolley, M. T., Shepherd, R. F., Karpelson, M., Bartlett, N. W., Galloway, K. C., Wehner, M., … & Wood, R. J. (2014, September). An untethered jumping soft robot. In 2014 IEEE/RSJ International Conference on Intelligent Robots and Systems (pp. 561-566). IEEE.
4. Yang, Y., He, Z., Lin, G., Wang, H., & Jiao, P. (2022). Large deformation mechanics of the thrust performances generated by combustion-enabled soft actuators. International Journal of Mechanical Sciences, 229, 107513.
5. Lin, G., Yang, Y., He, Z., & Jiao, P. (2022). Hydrodynamic optimization in high-acceleration underwater motions using added-mass coefficient. Ocean Engineering, 263, 112274.
6. He, Z., Yang, Y., Jiao, P., Wang, H., Lin, G., & Pähtz, T. (2023). Copebot: underwater soft robot with copepod-like locomotion. Soft Robotics, 10(2), 314-325.
7. Wang, H., Yang, Y., Lin, G., Jiao, P., & He, Z. (2020). Untethered, high-speed soft jumpers enabled by combustion for motions through multiphase environments. Smart Materials and Structures, 30(1), 015035.
9. Yang, Y., Lou, Y., Lin, G., He, Z., & Jiao, P. (2022). Hydrodynamics of high-speed robots driven by the combustion-enabled transient driving method. Journal of Zhejiang University-SCIENCE A, 23(10), 820-831.
10. Y. Yang, J. Lai, C. Xu, Z. He, P. Jiao, H. Ren (2023). Lightweight Pneumatically Elastic Backbone Structure (PEBS) with Modular Construction and Nonlinear Interaction for Soft Actuators. Soft Robotics, Accepted & Publish in progress.
11. Y. Yang, S. Yuan, H. Ren (2023). Reversible elastomer-fluid transition for metamorphosic robots. Preprint is under review at Nature Portfolio. Preprint DOI: 10.21203/Rs.3.Rs-2589975/V1
